ツインモーター4WDだから実現できた意のままの走り! 三菱新型エクリプス クロスPHEVの「S-AWC」に迫る
- 2020/10/24
-
安藤 眞


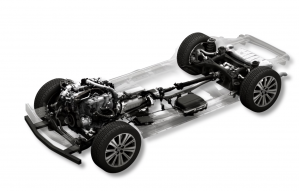
12月に発売を予定している三菱エクリプス クロスPHEV。注目ポイントの一つは、ツインモーター4WDからなるS-AWCだ。そのコンセプトと概要をご紹介しよう。
TEXT●安藤眞(ANDO Makoto) PHOTO●三菱自動車工業/MotorFan.jp







デザイン一新&PHEVを追加した新型三菱エクリプス クロスが登場! ツインモーター4WDの走りは悪天候でも頼もしい
2017年に登場した三菱のクロスオーバーSUV、エクリプス クロスがこのたびデザインを一新し、新たにPHEVモデルを追加する。10...
ランエボXでできなかった理想の駆動力配分をツインモーター4WDが実現

新型エクリプス クロスPHEVに採用される4WD制御は、車両運動統合制御システムS-AWC(Super All Wheel Control)と呼ばれるもの。4輪駆動による前後駆動力配分と、AYC(Active Yaw Control)による左右間トルクベクタリング、4輪ブレーキ制御によるESC(Electronic Stability Control。三菱の商品名はASC)を統合制御し、車両の運動性能を最大限に引き出すことを目的としている。


基本として知っておきたいのは、「タイヤのグリップ力はどの方向にも同じ大きさしか使うことができない」ということ。これを円で表したのが“摩擦円”と呼ばれるもので、駆動/制動力と横Gの合力は、これを越えることができない。後輪駆動車で旋回中に強い駆動力を加えるとドリフトするのは、駆動方向に摩擦円を使い切ってしまい、横Gに耐えるグリップ力が足りなくなってしまうからだ。
また、4本とも同じタイヤを使っている場合、摩擦円の大きさ=タイヤのグリップ力は、接地荷重に比例する。すなわち、加速して後輪に荷重移動が起きれば後輪の摩擦円が大きくなり、旋回の横Gで外輪に荷重移動が起きれば、外輪側の摩擦円が大きくなる。そんなふうに刻々と変化する摩擦円を適切に活用して運動性能を理想化しようというのが、S-AWCだ。
摩擦円の大きさは、重心位置と荷重移動で決まるため、どう制御すれば良いのかは、車両運動性能解析の基礎となる4輪モデルの運動方程式から導き出すことができる。

それをグラフ化したのが上の図で、横軸が前輪のトルク配分、縦軸が後輪のトルク配分。GXは前後方向の加速度、GYは左右方向の加速度だ(グラフは路面の摩擦係数によって異なる)。GXとGYの合力の最大値を結んだのが青い曲線(直結4WD相当)。等高線のような四角形は、駆動トルクを変化させた際に発揮できる横Gが同じになる点を結んだもの。
これらをベースに導き出したのが、トラクション性能も旋回性能も最大になる“理想前後トルク配分(赤い曲線)”。それぞれの前後Gで横Gが最大になるポイントを結んでいることが読み取れる。これを基準にフィードフォワード制御を行なえば、運動性能を理想化する前後駆動トルク配分が実現できるというわけだ(実際には官能評価を反映して修正を加えている)。
三菱はこれまで、このS-AWC制御を実現するために、いくつかの機構をトライしてきた。
最初に採用されたのがランサーエボリューションXで、機械式センターデフには電子制御多板クラッチ式の差動制限機構を、フロントデフにはヘリカル式のLSDを、リヤデフにはダブルピニオン式の遊星歯車と油圧多板クラッチを使用したトルク移動機構を採用するという複雑なシステムだった。つぎに登場したのがアウトランダーで、前後の駆動力配分を油圧多板クラッチで、左右のそれはブレーキ介入によるトルクベクタリング制御(ブレーキAYC)を利用することで実現していた。
しかし、差動制限にしても油圧多板クラッチにしても、駆動系の拘束力を強めた結果として接地荷重に応じた駆動力が出ているだけで、厳密に言えばトルクを“配分”しているのではない。しかもクラッチの滑らせ具合に依存しているので、トルク伝達量は“推定”でしかなく、理論値どおりのトルク配分が実現できているとは言いがたかった。

それでも、行なわないよりは、はるかに高い運動性能を得ることができるのだが、前後独立したモーターによる4WDならば、理論値どおりの駆動トルク配分が実現できる。しかもトルク応答が速く、制御自由度も高いから、フィードバック制御する際にも、制御式に忠実なトルク配分を実現することができる。
左右輪間のトルク配分制御は、内燃機関搭載モデルと同様、ブレーキによるAYCで行なっている。姿勢が大きく乱れるとASCが介入し、それとわかる振動が発生するが、S-AWC制御とドライバーの運転操作で復元できる範囲なら、ASCは介入させないようにしているとのこと。
究極の安全はすべてを機械に任せることではなく、ドライバーが路面と対話しながらリスクコントロールできる能力を身につけることであり、そうしたスキルアップを安全にサポートするクルマでありたい、という哲学によるものだ。






|
|
|
自動車業界の最新情報をお届けします!
Follow @MotorFanwebおすすめのバックナンバー






これが本当の実燃費だ!ステージごとにみっちり計測してみました。

日産キックス600km試乗インプレ:80km/h以上の速度域では燃費...
- 2021/03/26
- インプレッション

BMW320d ディーゼルの真骨頂! 1000km一気に走破 東京〜山形...
- 2021/04/03
- インプレッション

日産ノート | カッコイイだけじゃない! 燃費も走りも格段に...
- 2021/02/20
- インプレッション

渋滞もなんのその! スイスポの本気度はサンデードライブでこ...
- 2019/08/11
- インプレッション

PHEVとディーゼルで燃費はどう違う? プジョー3008HYBRID4と...
- 2021/06/28
- インプレッション

スズキ・ジムニーとジムニーシエラでダート走行の燃費を計って...
- 2019/08/09
- インプレッション
会員必読記事|MotorFan Tech 厳選コンテンツ

フェアレディZ432の真実 名車再考 日産フェアレディZ432 Chap...
- 2018/08/28
- 新車情報

マツダ ロータリーエンジン 13B-RENESISに至る技術課題と改善...
- 2020/04/26
- コラム・連載記事

マツダSKYACTIV-X:常識破りのブレークスルー。ガソリンエン...
- 2019/07/15
- テクノロジー

ターボエンジンに過給ラグが生じるわけ——普段は自然吸気状態
- 2020/04/19
- テクノロジー

林義正先生、「トルクと馬力」って何が違うんですか、教えて...
- 2020/02/24
- テクノロジー

マツダ×トヨタのSKYACTIV-HYBRIDとはどのようなパワートレイ...
- 2019/07/27
- テクノロジー
Motor-Fanオリジナル自動車カタログ
自動車カタログTOPへ
Motor-Fan厳選中古車物件情報

三菱 エクリプスクロス
P 4WD/マイパイロット/純正スマホ連携ナビ/フルセグTV/全方位カメラ/ハンズフリーパワーバ...
中古価格 295.9万円

三菱 エクリプスクロス
P 4WD マイパイロット e-Assist 禁煙車 純正ナビ 全周囲カメラ ETC Bluet...
中古価格 314.9万円

三菱 エクリプスクロス
G 4WD ターボ 社外メモリーナビ 地デジTV Bluetooth USB バックカメラ HD...
中古価格 333.8万円

三菱 エクリプスクロス
G ナビ 地デジフルセグ Bluetooth バックカメラ シートヒーター スマートキー×2 ルー...
中古価格 164.1万円

三菱 エクリプスクロス
中古価格 245万円

三菱 エクリプスクロス
G 1オーナー SDナビ 衝突被害軽減ブレーキ
中古価格 291.9万円