日立オートモティブシステムズ:高精度な追従走行を可能にする技術を開発
- 2019/10/15
- Motor Fan illustrated編集部
日立オートモティブシステムズ)は、一般道での自動運転車両の実用化に向け、大きな舵角で旋回をするような場面や、他車両や歩行者の急な飛び出し、また、路上の落下物を回避するための急旋回が必要な場面においても、ステレオカメラやレーダーがセンシングした情報によりAD/ADAS ECUが指示する軌道を正確に追従走行するための車両制御技術を開発した。
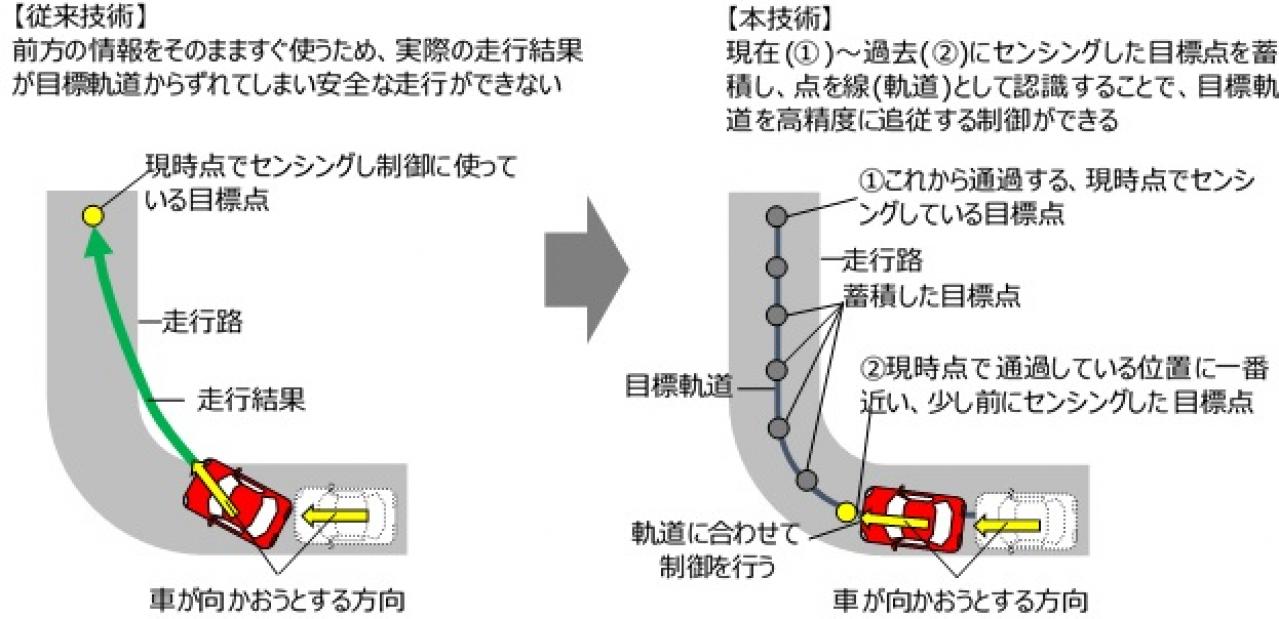
一般道において自動運転車両が走行する場合、高速道路と違い、狭く入り組んだ路地やショッピングセンターなどの駐車場のような内輪差が大きく小回りをする走行に加えて、自車以外の車両のほか歩行者など様々な移動対象、さらに進行方向上の落下物などを回避する走行が必要になる。しかし、このような走行において大きな舵角旋回や急な舵角操作が求められる操作シーンでは、センシングした前方の情報に基づいて車両制御しても、実際の走行結果が目標となる軌道からずれてしまい安全な走行ができないことが課題だった。
本技術では、前方のセンシング情報をそのまますぐに使うのではなく、ECU内に一旦蓄積してから使うことで過去から現在までの点を線(軌道)として認識し、目標となる軌道を高精度に追従できるようにした。加えて、これまで、目標軌道に合わせてアクチュエーターを動かそうとすると、一般的にアクチュエーターや車両が応答するまでの遅れによって、軌道追従の精度が下がったり車両制御の安定性が損なわれたりする問題があった。本技術では、ECU内で車両運動の予測シミュレーションを行い、アクチュエーターや車両の応答を予測しているため、応答遅れに対して補正を行い、軌道追従の精度をさらに高めている。
|
|
|
自動車業界の最新情報をお届けします!
Follow @MotorFanwebこれが本当の実燃費だ!ステージごとにみっちり計測してみました。

日産キックス600km試乗インプレ:80km/h以上の速度域では燃費が劇...

BMW320d ディーゼルの真骨頂! 1000km一気に走破 東京〜山形往復...

日産ノート | カッコイイだけじゃない! 燃費も走りも格段に洗練...

渋滞もなんのその! スイスポの本気度はサンデードライブでこそ光...

PHEVとディーゼルで燃費はどう違う? プジョー3008HYBRID4とリフ...

スズキ・ジムニーとジムニーシエラでダート走行の燃費を計ってみた...
会員必読記事|MotorFan Tech 厳選コンテンツ

フェアレディZ432の真実 名車再考 日産フェアレディZ432 Chapter2...

マツダ ロータリーエンジン 13B-RENESISに至る技術課題と改善手法...

マツダSKYACTIV-X:常識破りのブレークスルー。ガソリンエンジン...

ターボエンジンに過給ラグが生じるわけ——普段は自然吸気状態

林義正先生、「トルクと馬力」って何が違うんですか、教えてくだ...

マツダ×トヨタのSKYACTIV-HYBRIDとはどのようなパワートレインだ...
3分でわかる! クルマとバイクのテクノロジー超簡単解説

3分でわかる! スーパーカブのエンジンが壊れない理由……のひとつ...

3分でわかる! マツダのSKYACTIV-X(スカイアクティブ-X)ってな...

スーパーカブとクロスカブの運転が楽しいのは自動遠心クラッチ付...

ホンダCB1100の並列4気筒にはなぜV8のようなドロドロ感があるのか...

ホンダ・シビック タイプRの謎、4気筒なのになぜマフラーが3本?
