すべりなどの位置ずれが少ないステアリングによる全方向の方向転換・移動が可能 ヴイストン:4輪独立ステアリング駆動方式 ROS対応台車ロボット「4WDSローバーVer2.0」発売
- 2019/02/06
- Motor Fan illustrated編集部

ロボット関連製品の開発・製造・販売を行うヴイストンは、研究開発用台車ロボット「4WDSローバーVer2.0」を2019年1月31日より販売している。
「4WDSローバーVer2.0」は、4輪の独立駆動輪を備え、それぞれの車輪をステアリングで方向転換させることにより、全方向へのスムーズな動作を実現する移動台車ロボット。可搬重量約40kg、最高速度1.6m/sで、様々な用途の研究、開発用のベースロボットとして、また、搬送台車としての活用など、広範囲な用途に対応できる。Wi-Fi / BLE / Bluetooth Classicの無線通信規格と、USBシリアル通信に対応しており、PCやタブレット、Raspberry Piなどから制御できる。また、ROSを使った制御に対応している。制御ボードには、Arduino互換ボード「VS-WRC021」を搭載しており、Arduino IDEを用いてプログラムすることで動作させることも可能。
商品特徴

・全方向移動台車ロボット
4輪のメカナムホイールを駆動輪として使用しているため、前後方向の移動や旋回動作だけでなく、左右方向や斜め方向への平行移動が可能。さらに、各ホイールにサスペンションを装備したことで、1cm程度の段差であれば各輪が確実に接地し、安定した走行を実現する。

・無線/有線接続で制御
Wi-Fi / BLE / Bluetooth Classic の3種の無線通信と、有線のUSBシリアル通信に対応。指定のコマンドを用いることで、PC やタブレットなど、様々なデバイスから本体を制御することが可能。また、Raspberry Pi の GPIO ソケットと互換のコネクタが搭載されているため、ロボット本体にRaspberry Piを簡単に搭載することができ、 制御にも使用することができる。
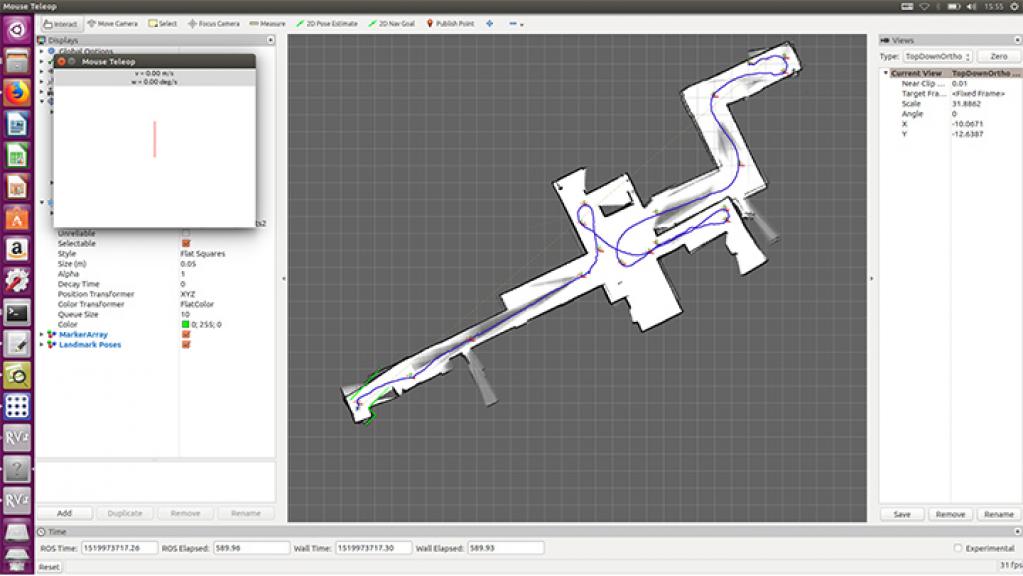
・ROSメッセージ通信でコントロール
Wi-Fiまたは、USBシリアル通信を用いてROS環境に接続することができる。ROSのメッセージ通信に対応しているので、速度や旋回量の指令値を、わずか数行のコードでメカナムローバーに送信することができる。導入ドキュメントとサンプルプログラムが付属するため、初心者の方でも、ROS 環境で制御システムを作成し、簡単に動かすことができる。
※ ROSを動作させるデバイスは別途用意する必要あり
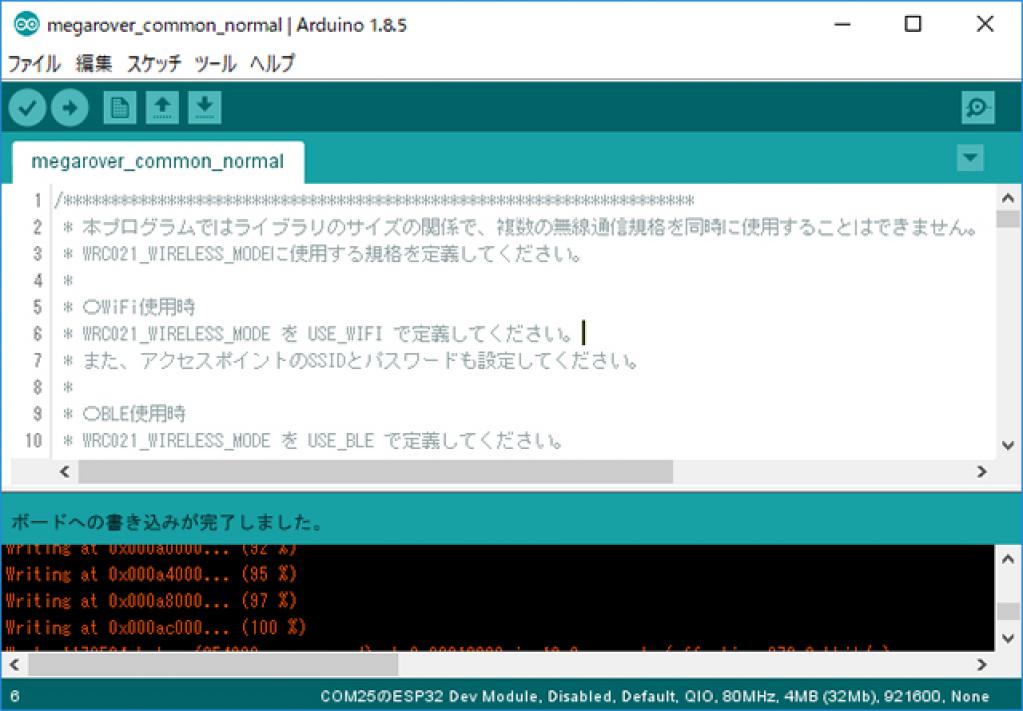
・Arduino IDEでプログラム可能
メカナムローバーVer2.0の制御ボードである「VS-WRC021」には、ESP-WROOM-32 マイコンが搭載されている。そのため、Arduino IDEを用いて制御プログラムを作成することが可能。また、製品付属のライブラリには、モータ制御関数や通信関数が含まれているので、少ない開発負担で制御プログラムを作成することもできる。
【製品概要】
製品名:4WDSローバーVer2.0
型番:4562179394534
価格:オープン
サイズ:383(L)×376(W)×188(H) [mm]
バッテリー:12Vシール鉛312wh
駆動方式:4輪駆動、4輪独立ステアリング、サスペンション
モータ:DCモータ 70W×4
回転検出:ホール素子、エンコーダ ※要エンコーダオプション(別売)
付属品:充電器、無線コントローラ
インターフェース:USBシリアル、Wi-Fi、Bluetooth Classic、BLE
※注文時オプション:バンパーセンサ(前後、全周)、レーザレンジファインダー、Raspberry Pi 3B、ホイール用エンコーダ
|
|
|
自動車業界の最新情報をお届けします!
Follow @MotorFanwebこれが本当の実燃費だ!ステージごとにみっちり計測してみました。

日産キックス600km試乗インプレ:80km/h以上の速度域では燃費が劇...

BMW320d ディーゼルの真骨頂! 1000km一気に走破 東京〜山形往復...

日産ノート | カッコイイだけじゃない! 燃費も走りも格段に洗練...

渋滞もなんのその! スイスポの本気度はサンデードライブでこそ光...

PHEVとディーゼルで燃費はどう違う? プジョー3008HYBRID4とリフ...

スズキ・ジムニーとジムニーシエラでダート走行の燃費を計ってみた...
会員必読記事|MotorFan Tech 厳選コンテンツ

フェアレディZ432の真実 名車再考 日産フェアレディZ432 Chapter2...

マツダ ロータリーエンジン 13B-RENESISに至る技術課題と改善手法...

マツダSKYACTIV-X:常識破りのブレークスルー。ガソリンエンジン...

ターボエンジンに過給ラグが生じるわけ——普段は自然吸気状態

林義正先生、「トルクと馬力」って何が違うんですか、教えてくだ...

マツダ×トヨタのSKYACTIV-HYBRIDとはどのようなパワートレインだ...
3分でわかる! クルマとバイクのテクノロジー超簡単解説

3分でわかる! スーパーカブのエンジンが壊れない理由……のひとつ...

3分でわかる! マツダのSKYACTIV-X(スカイアクティブ-X)ってな...

スーパーカブとクロスカブの運転が楽しいのは自動遠心クラッチ付...

ホンダCB1100の並列4気筒にはなぜV8のようなドロドロ感があるのか...

ホンダ・シビック タイプRの謎、4気筒なのになぜマフラーが3本?
