ボッシュ:市街地の自動運転において車両とインフラを連携
- 2020/08/04
- Motor Fan illustrated編集部
ボッシュは、パートナー企業/団体とともに進めてきた「MEC-View研究プロジェクト」について、同プロジェクトで得られた知見を発表する。
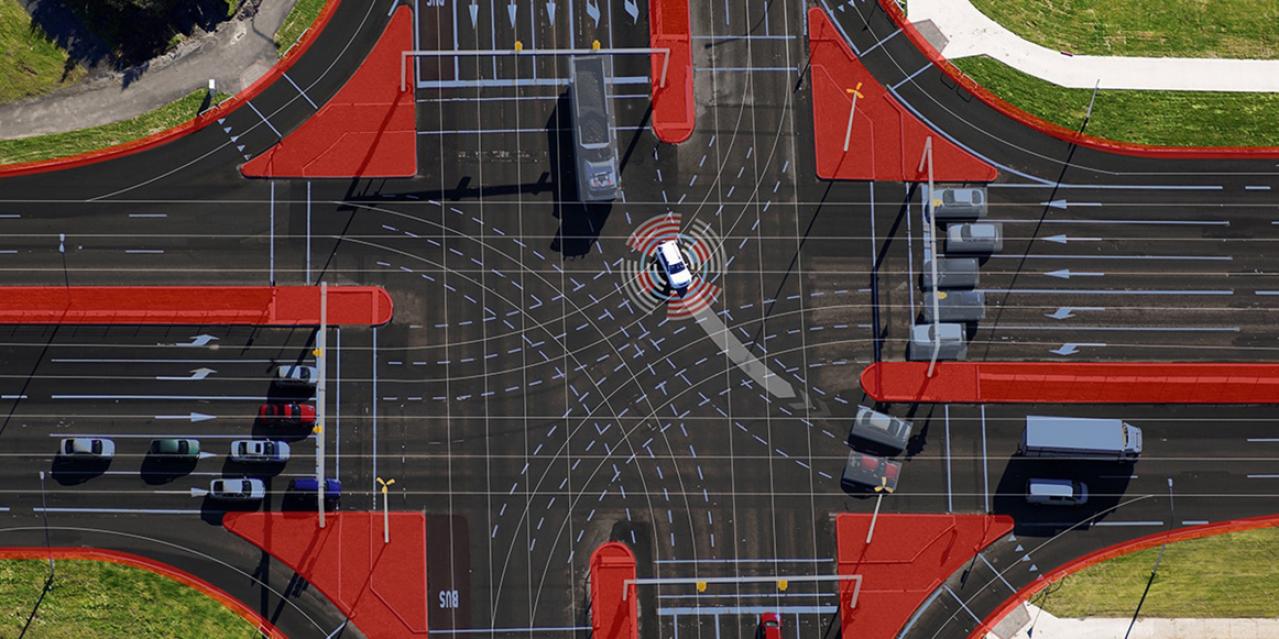
走行車両から見えにくい歩行者、車両の前を通過する自転車、突然迫って来るバス。頻繁に道路利用者同士のやり取りが生じる市街地走行は、突然難しい判断を迫られることがある。そのような環境で、街灯に都市交通の安全性の強化と、自動運転車両への交通状況の概要を提供する役割を担わせることができるのではないか。これがMEC-View研究プロジェクトのテーマだった。
プロジェクトが考えたのは、街灯にビデオセンサーやライダー(LiDAR=光検出・測距)センサーを組み込むこと。そうすれば、高度なモバイル通信技術を利用して重要な情報をリアルタイムで車両に提供し、他の車両、自転車、歩行者といった障害物を迅速かつ確実に検知することができる。3年以上の開発期間を経て、ついにこのプロジェクトで得られた知見を発表する準備が整った。ドイツ経済エネルギー省(BMWi)から550万ユーロの資金援助を受けた同プロジェクトのパートナーには、コンソーシアムリーダーを務めたボッシュとともに、メルセデス・ベンツ、ノキア、オスラム、TomTom、IT Designers、デュースブルク=エッセン大学、ウルム大学が名を連ねている。アソシエイトパートナーはウルム市で、過去3年間、街灯に組み込まれたセンサーおよび関連するネットワーク化技術の実験場としての役割を果たしてきた。現在は、プロジェクトを通して得られた知見を利用し、自動車機器テクノロジー、自動運転、モバイル通信技術のさらなる開発が進められている。また、プロジェクトで構築したインフラは、ほかの研究プロジェクトでも利用できるようになる。
虫の視線に勝る鳥の視線

街灯の高さは最高で路上から6メートルにもなる。したがって交通量の多い交差点を上空から鳥のように正確に見通すことが可能で、このような情報は自動運転車両にとって将来必要なものとなるだろう。
カメラ、レーダー、LiDARセンサーなどで構成される車載センサーシステムは360°の正確な視界を提供する。これには地面からの視界と車両からの視界があるが、トラックに遮られる歩行者、物陰から現れる乗用車、背後から接近して急な車線変更を試みる自転車などを認識するには必ずしも十分とは言えない。「車両には曲がり角や壁の向こうを見通す能力はないため、街灯にセンサーを組み込むことで車載センサーの視野を拡大することにしました」と、コンソーシアムリーダーであるボッシュでMEC-Viewプロジェクトを率いるRüdiger Walter Henn氏は述べている。
プロジェクトパートナーが、この目的に対応するハードウェアおよびソフトウェアを開発した。このシステムでインフラのセンサーから取得した画像と信号を処理し、高解像度デジタルマップ(HDマップ)と組み合わせて無線で車両に伝送する。さらに伝送されたこのデータを車載センサーの情報と統合し、関連するすべての道路利用者を含む精度の高い周辺画像を生成する。
データの無線伝送
最先端のモバイル通信技術は、センサー情報の超低遅延伝送が可能。MEC-Viewプロジェクトでは、これを目的として設定を最適化した新しい5G通信規格のLTEモバイル通信技術を採用し、リアルタイムのデータ伝送を基本とした。
遅延時間を最適化したモバイル通信の主な目的は、無線を介した事実上瞬時のデータ伝送だけではなく、そのデータの処理をできる限りソースに近づけることでもある。この目的を達成するのが、モバイルエッジコンピューティングサーバー(略称はMECサーバー)として知られる特殊なコンピュータで、移動通信網に直接組み込まれる。このサーバーが、街灯のセンサーのデータと車両のサラウンドセンサーのデータ、そして極めて高精度なデジタルマップを統合する。このようにして現在の交通状況に関して可能な限りの情報を含む周囲状況のモデルを生成し、無線を介してそれを各車両で利用できるようにする。将来的に都市交通管制センターなどの施設にこのようなサーバーを導入すれば、メーカーに関係なくすべての車両、さらにはほかの道路利用者ともデータを共有できるようになる。
交通とのシームレスな統合

ウルム市では、2018年から、実際の交通状況でプロジェクトパートナーによる自動運転のテスト車両とインフラのセンサー間のデータ送信のテストが行われている。
レーア地区に非常に見通しが悪いことで知られる交差点がある。ここに設置されている街灯にセンサーを組み込み、交差点での自動運転車両の運転を支援する試みが行われた。側道から運転の難しいこの交差点に近づいた車両は本道に合流する必要がある。このような場合に、新しく開発された技術により、自動運転のテスト車両がいち早く道路利用者を認識し、状況に応じて適切な走行モードに切り替えられるようになった。そのため、本道の交通の流れを見定めて停車せずにスムーズに本道に合流することができる。
このような技術の開発は、都市交通の安全性を高め、道路交通を円滑化する。プロジェクト期間中、ウルム市に構築されたインフラは引き続き利用され、今後の研究プロジェクトにも活用される予定だ。
|
|
|
自動車業界の最新情報をお届けします!
Follow @MotorFanwebおすすめのバックナンバー





これが本当の実燃費だ!ステージごとにみっちり計測してみました。

日産キックス600km試乗インプレ:80km/h以上の速度域では燃費が劇...

BMW320d ディーゼルの真骨頂! 1000km一気に走破 東京〜山形往復...

日産ノート | カッコイイだけじゃない! 燃費も走りも格段に洗練...

渋滞もなんのその! スイスポの本気度はサンデードライブでこそ光...

PHEVとディーゼルで燃費はどう違う? プジョー3008HYBRID4とリフ...

スズキ・ジムニーとジムニーシエラでダート走行の燃費を計ってみた...
会員必読記事|MotorFan Tech 厳選コンテンツ

フェアレディZ432の真実 名車再考 日産フェアレディZ432 Chapter2...

マツダ ロータリーエンジン 13B-RENESISに至る技術課題と改善手法...

マツダSKYACTIV-X:常識破りのブレークスルー。ガソリンエンジン...

ターボエンジンに過給ラグが生じるわけ——普段は自然吸気状態

林義正先生、「トルクと馬力」って何が違うんですか、教えてくだ...

マツダ×トヨタのSKYACTIV-HYBRIDとはどのようなパワートレインだ...
3分でわかる! クルマとバイクのテクノロジー超簡単解説

3分でわかる! スーパーカブのエンジンが壊れない理由……のひとつ...

3分でわかる! マツダのSKYACTIV-X(スカイアクティブ-X)ってな...

スーパーカブとクロスカブの運転が楽しいのは自動遠心クラッチ付...

ホンダCB1100の並列4気筒にはなぜV8のようなドロドロ感があるのか...

ホンダ・シビック タイプRの謎、4気筒なのになぜマフラーが3本?
