ジェイテクト(JTEKT)「次世代都市交通 正着制御システム」 じつはこの技術、自動運転時代に必要です。センシング技術と制御技術を組み合わせて、バス停にピッタリ停める
- 2018/06/16
-
Motor Fan illustrated編集部 鈴木慎一


5月8~10日に開催された第16回アジア太平洋地域ITSフォーラム2018福岡で、ジェイテクトが「次世代都市交通 正着制御システム」のデモンストレーションを行なった。「正着制御」とはいったいなんだろう?
TEXT&PHOTO◎鈴木慎一(SUZUKI Shin-ichi)
自動運転時代のバスをバス停にぴったりと停める
「次世代都市交通 正着制御システム」は、内閣府が推進する戦略的イノベーション創造プログラム(SIP)の一環としてNEDOからジェイテクトが委託を受けて開発している技術だ。
「正着制御」という聞き慣れない用語は、この技術を開発するにあたって作り出された造語。英語表記の「Precise Dockng Control System」というのも正着制御に合わせて作った表記だという。
簡単に説明すれば、自動運転時代の都市交通機関を(バスや小型のピープルムーバー)が、所定の場所(バス停を想像していただきたい)にぴったりと停める技術である。

自動運転が最初に実用化される分野として、すぐに思い浮かべるのは、あらかじめ走行ルートを決めプログラムして走るバスだと思っていた。自動運転の無人バスが決まった路線を循環、または往復するというイメージだ。過疎化や高齢化が進んだ地域では移動手段して有効だし、道路条件(交通量が少ない)を考えても技術的ハードルは高くない……と漠然と考えていた。
今回、福岡でジェイテクトが行なったデモを見て、バス停にピタリと停める技術なしに、自動運転バスは成立しないということを痛感した。高齢者や車いす、ベビーカー利用者が介助なしでスムーズに乗降するには、バス停から数センチ以内程度に「正着」しないと難しい。
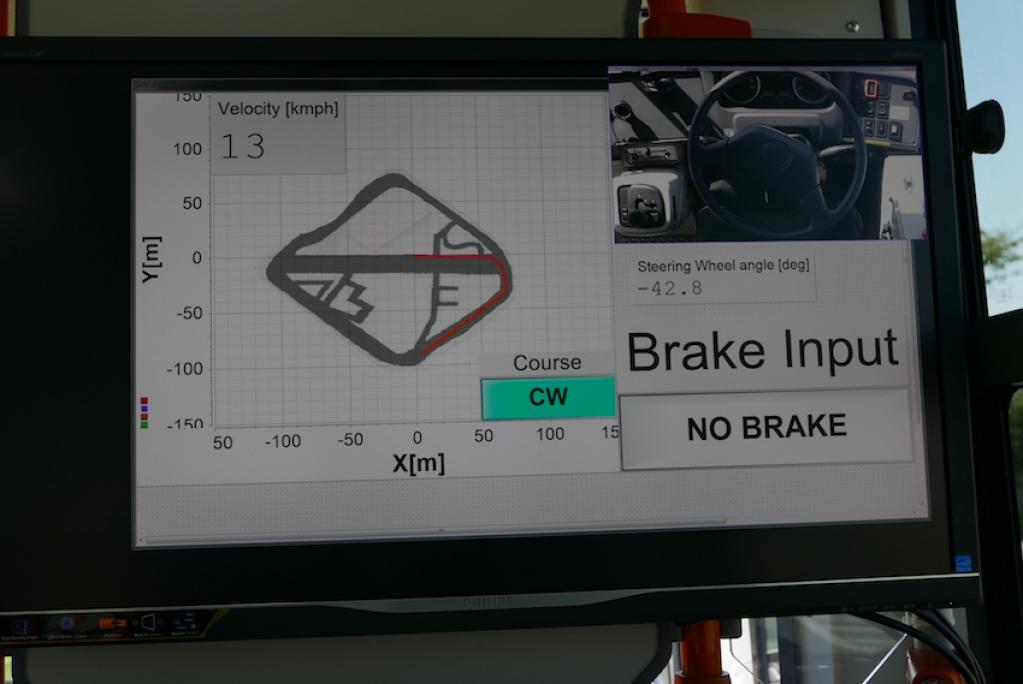

走行ルートは、事前にプログラムされている。その軌道に対して自車位置は高精度GPS(RTK-GPS)を使ってセンシングし、目標に対してのずれを補正しながら走るわけだ。こう書くとさして難しくないように思うかもしれないが、大型車両は応答遅れも大きい。路面もフラットではない。車両側のジャイロセンサーでクルマが振られたことを検出してから舵を当てたのでは遅いし、スムーズな動きにはならない。会場にいた西鉄バスのベテラン運転手に聞くと「あそこまでぴったりに毎回停めるのは、ベテランでも難しい」という。機械がやっているのだから、毎回同じ動きになるのは当然とも思えるが、見ているとその動きに惚れ惚れする。

今度はバスに同乗してみた。運転手はシフト操作とアクセル操作のみでステアリングホイールには手を触れていない。コーナーが迫ってくるとステアリングホイールはスルスルと非常に滑らかに回る。少しもカクカクした動きがないのが素晴らしい。
「滑らかに動かすのは一朝一夕にはできません。油圧パワーステアリングを含めたシステム全体を把握することが重要です。大型バスは車両の応答がすごく遅いし、ステアリングホイールからタイヤまでが遠く、複雑な機構で動かしているので、タイヤを滑らかに精度高くコントロールするのが難しい。先読み、とまでは言えませんが、フィードフォワード的な要素も制御ロジックに入れています」とのジェイテクトからの説明だった。 ステアリングホイールの動きがカクカク不自然だと乗客にも、乗務員(しばらくは運転席に人が座ることになるだろうから)にも不安を与えることになる。目標とするのはベテラン運転手と同じような自然でスムーズな操舵である。
バス停が近づいてくる。バスは躊躇することなく(当然だが)、極めてスムーズに減速してピタリとバス停で停まった。定規で測ると、やはり7cmだった。



- 1/2
- 次へ
|
|
|
自動車業界の最新情報をお届けします!
Follow @MotorFanwebこれが本当の実燃費だ!ステージごとにみっちり計測してみました。

日産キックス600km試乗インプレ:80km/h以上の速度域では燃費が劇...

BMW320d ディーゼルの真骨頂! 1000km一気に走破 東京〜山形往復...

日産ノート | カッコイイだけじゃない! 燃費も走りも格段に洗練...

渋滞もなんのその! スイスポの本気度はサンデードライブでこそ光...

PHEVとディーゼルで燃費はどう違う? プジョー3008HYBRID4とリフ...

スズキ・ジムニーとジムニーシエラでダート走行の燃費を計ってみた...
会員必読記事|MotorFan Tech 厳選コンテンツ

フェアレディZ432の真実 名車再考 日産フェアレディZ432 Chapter2...

マツダ ロータリーエンジン 13B-RENESISに至る技術課題と改善手法...

マツダSKYACTIV-X:常識破りのブレークスルー。ガソリンエンジン...

ターボエンジンに過給ラグが生じるわけ——普段は自然吸気状態

林義正先生、「トルクと馬力」って何が違うんですか、教えてくだ...

マツダ×トヨタのSKYACTIV-HYBRIDとはどのようなパワートレインだ...
3分でわかる! クルマとバイクのテクノロジー超簡単解説

3分でわかる! スーパーカブのエンジンが壊れない理由……のひとつ...

3分でわかる! マツダのSKYACTIV-X(スカイアクティブ-X)ってな...

スーパーカブとクロスカブの運転が楽しいのは自動遠心クラッチ付...

ホンダCB1100の並列4気筒にはなぜV8のようなドロドロ感があるのか...

ホンダ・シビック タイプRの謎、4気筒なのになぜマフラーが3本?
