トムトム:自動運転向け高精度地図生成の実証実験でTRI-AD、デンソーと協業
- 2020/03/11
- Motor Fan illustrated編集部
TomTom(トムトム)は、トヨタ・リサーチ・インスティテュート・アドバンスト・デベロップメント(TRI-AD)とデンソーとともに、より安全な自動運転の実現に不可欠となる高速かつ高精度(HD)な地図生成手法の開発に向けた実証実験(PoC)の成功を発表した。
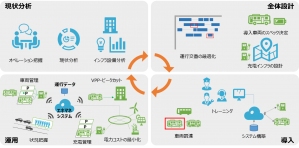
このPoCは、デンソーの車両センサーを搭載したTRI-ADの試験車、TRI-ADの自動地図生成プラットフォームであるAutomated Mapping Platform(AMP)ならびにトムトムのクラウドベースのトランザクション・マップ・プラットフォームの活用により実現した。車両センサーは道路上で観測された情報を収集し、それらの情報はTRI-ADのAMPによりデータ形式変換および補正がされ、トムトムのトランザクション・マップ・プラットフォームに反映される。
これらのクラウドソースマップの更新は、トムトムのHDマップが実際の道路の状態を正確に反映するために活用される地図アップデート情報であるローダグラム(Roadagrams)によって実現する。これにより、調査車両からのセンサーデータと組み合わせることで、トムトムが高精度地図の精度を維持できるようになる。
トムトム自動運転部門責任者ウィレム・ストライボッシュ氏(Willem Strijbosch)は、以下のようにコメントしている。
「トムトムでは、様々なソースを元に高精度地図を作ることでより安全な自動運転を可能にします。デンソーとTRI-ADとともに、HDマップの更新を可能にする、高速かつ高精度な地図生成方法を提供できることを喜ばしく思います」
TRI-AD Automated Driving Strategy and Mapping Vice President マンダリ・カレシー氏(Mandali Khalesi)は以下のようにコメントした。「パートナー企業と協力して、AMPにより、一般車両の車載センサーを使ったHDマップ生成が可能であることを実証しました。これにより、今後の活用の可能性が広がりました。人々にとって自動運転がより安全で身近な技術となる未来にまた一歩近づきました」
デンソー エグゼクティブフェロー藤守規雄氏は以下のようにコメントした。「TRI-ADおよびトムトムと今後も多くのコラボレーションに取り組み成功することを期待します。デンソーのハードウェアとソフトウェアの両方を組み合わせることで、未来のモビリティの変革を実現します」
トムトムは、米国、欧州、ならびに東アジアの高速道路を対象範囲とした高精度地図のサプライヤーとして複数の世界的自動車メーカーと契約締結し、高精度地図のマーケットをリードしている。
|
|
|
自動車業界の最新情報をお届けします!
Follow @MotorFanwebおすすめのバックナンバー







これが本当の実燃費だ!ステージごとにみっちり計測してみました。

日産キックス600km試乗インプレ:80km/h以上の速度域では燃費が劇...

BMW320d ディーゼルの真骨頂! 1000km一気に走破 東京〜山形往復...

日産ノート | カッコイイだけじゃない! 燃費も走りも格段に洗練...

渋滞もなんのその! スイスポの本気度はサンデードライブでこそ光...

PHEVとディーゼルで燃費はどう違う? プジョー3008HYBRID4とリフ...

スズキ・ジムニーとジムニーシエラでダート走行の燃費を計ってみた...
会員必読記事|MotorFan Tech 厳選コンテンツ

フェアレディZ432の真実 名車再考 日産フェアレディZ432 Chapter2...

マツダ ロータリーエンジン 13B-RENESISに至る技術課題と改善手法...

マツダSKYACTIV-X:常識破りのブレークスルー。ガソリンエンジン...

ターボエンジンに過給ラグが生じるわけ——普段は自然吸気状態

林義正先生、「トルクと馬力」って何が違うんですか、教えてくだ...

マツダ×トヨタのSKYACTIV-HYBRIDとはどのようなパワートレインだ...
3分でわかる! クルマとバイクのテクノロジー超簡単解説

3分でわかる! スーパーカブのエンジンが壊れない理由……のひとつ...

3分でわかる! マツダのSKYACTIV-X(スカイアクティブ-X)ってな...

スーパーカブとクロスカブの運転が楽しいのは自動遠心クラッチ付...

ホンダCB1100の並列4気筒にはなぜV8のようなドロドロ感があるのか...

ホンダ・シビック タイプRの謎、4気筒なのになぜマフラーが3本?
