自動運転での「右折」をどうするか?自動運転車両による「住宅地における路車間通信」の実証実験を神戸市で実施
- 2020/03/17
- Motor Fan illustrated編集部

株式会社IHI、あいおいニッセイ同和損害保険株式会社、沖電気工業株式会社、国立大学法人名古屋大学、一般財団法人日本自動車研究所、株式会社日本総合研究所は、まちなか自動移動サービス事業構想コンソーシアム(※1)が取り組んでいる、住宅地での移動サービス向けの運行設計領域(※2、以下「ODD」)の検討・定義の一環として、本日から3月25日まで、神戸市北区筑紫が丘で自動運転車両を用いた路車間通信の実証実験を実施する。
今回の実証実験の目的は、自動運転車両が交差点での右折や合流をする際に、死角からの飛び出しなどに備えたり、発進・停止や加減速のタイミングを最適化させたりするための、車載センサーと道路側センサーの協調による仕組みの検証である。
具体的には、自動運転車両の死角領域を含めた道路側センサーのセンシング状況や精度を評価すると共に、他の車両に不快感を与えない、安全で円滑な自動運転車両の挙動のあり方を検証する。また、これらの評価を条件の異なる複数の交差点で実施することにより、交差点の違いによるリスクの違いも可視化する。
本実証実験の結果を踏まえながら、各参加団体はODDの精緻化を進めると共に、最適な自動運転車両の走行方法と道路側センサーのあり方について、さらに検討していく。
(※1)まちなか自動移動サービス事業構想コンソーシアム
住宅地内の店舗や公共施設、病院、バス停等までの、いわゆるラスト&ファーストマイルの移動サービスを持続可能にするための事業構想を目的に、2018年に日本総研が設立した、産官学民によるコンソーシアムである。自治会、自治体を含む産官学民が連携して、サービスの社会実装に必要なシステムの仕様や事業仮説について検討している。
(※2) 運行設計領域(ODD: Operational Design Domain)
自動運転システムが正常に作動する前提となる設計上の走行環境に係る特有の条件のこと。ODDに含まれる走行環境条件としては、例えば次のものが挙げられる。
・道路条件(高速道路、一般道、車線数、車線の有無 、自動運転車の専用道路 等)
・地理条件(都市部、山間部、ジオフェンスの設定 等)
・環境条件(天候、夜間制限 等)
・その他の条件(速度制限、信号情報等のインフラ協調の要否 、特定された経路のみに限定すること、保安要員の乗車要否等)
本実証実験の内容
(1)実施概要
・実施地区: 神戸市北区筑紫が丘、広陵町、小倉台および桜森町
・実施場所: 優先道路と非優先道路による交差点(十字路2カ所、T字路1カ所の計3カ所)
・実施期間: 2020年3月16日(月)~2020年3月25日(水)
・実施主体: まちなか自動移動サービス事業構想コンソーシアム
・実証車両: 自動運転車両(ヤマハ製ゴルフカーをベース車体として,名古屋大学が自動運転システムを開発)
車載センサーおよび道路側センサーから取得した交差点付近の交通参加者の移動情報に基づき、発停車、加減速を判断する。
運転席および助手席には名古屋大学関係者が座り、万一の事態に備える。
・通過車両: 手動運転車両(名古屋大学関係者が運転)
(A)自動運転車両が交差点を右折する際、対向車線を通過する。
(B)非優先道路を走行する自動運転車両が優先道路である対角車線に合流する際、対角車線を通過する。
・一般車両、歩行者等:本実証実験では特に用意しない。ただし、一般車両および歩行者等についても道路側センサーおよび車載センサーでは感知し、実証車両の挙動に反映させる。
・道路側センサー: 交差点付近の電柱あるいは信号柱に、レーザセンサー(LiDAR)を設置
レーザセンサーが取得した交差点付近の交通参加者情報は、通信機器を通じて実証車両に送信される。
(2)実験の目的/内容
【目的】
①通過車両に不快感を与えない実証車両の挙動(交差点通過タイミング)の検証
・ 通過車両の助手席被験者および実証車両の同乗者被験者、そして実証車両周辺の被験者にヒアリングを実施
②道路側センサーのセンシング精度の評価
・ 実際の車両速度/加速度と道路側センサーの計測値の誤差を比較検証
・ 道路側センサーによる実証車両の死角位置のセンシング状況の評価
③交差点の特性に応じたリスクの評価
・複数の交差点において、信号機、中央線・分離帯、歩道、側溝などの有無のほか、一方通行や坂道、バス通りなどの条件に応じて異なるリスクを評価
【内容】
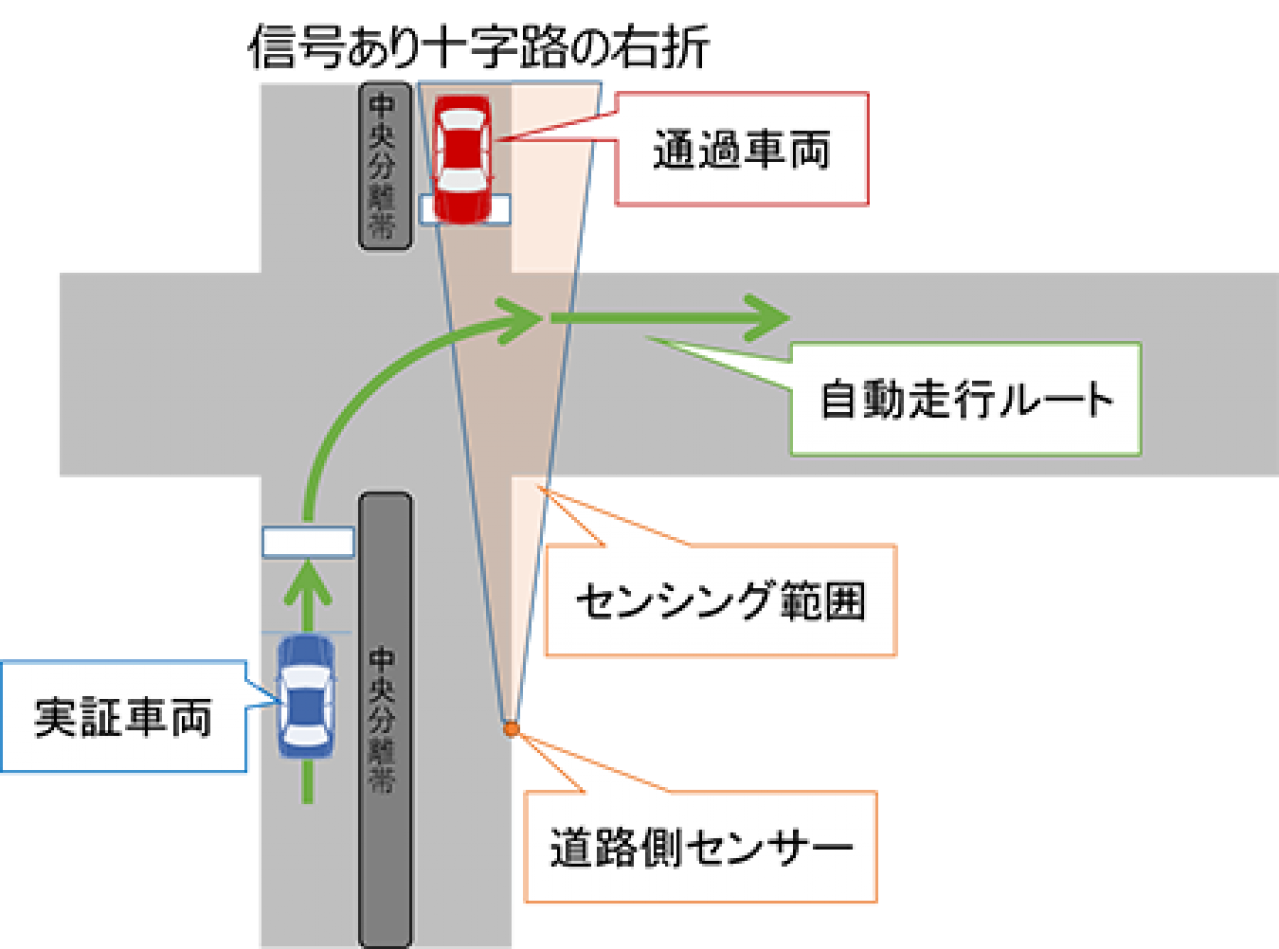
(A)信号あり交差点(十字路)での右折
信号交差点において、実証車両の右折挙動を検証する。
本実証実験は、対向車線を直線走行してくる通過車両の有無に分けて行う。実証車両は、車載センサーおよび道路側センサーからの取得情報を活用して通過車両や一般車両、歩行者等の有無を判断する。通過車両や一般車両、歩行者等が存在する場合は、それらの挙動(速度、加速度等)に応じて右折する。
評価は、右折による交通流の妨害の程度によって判断する。
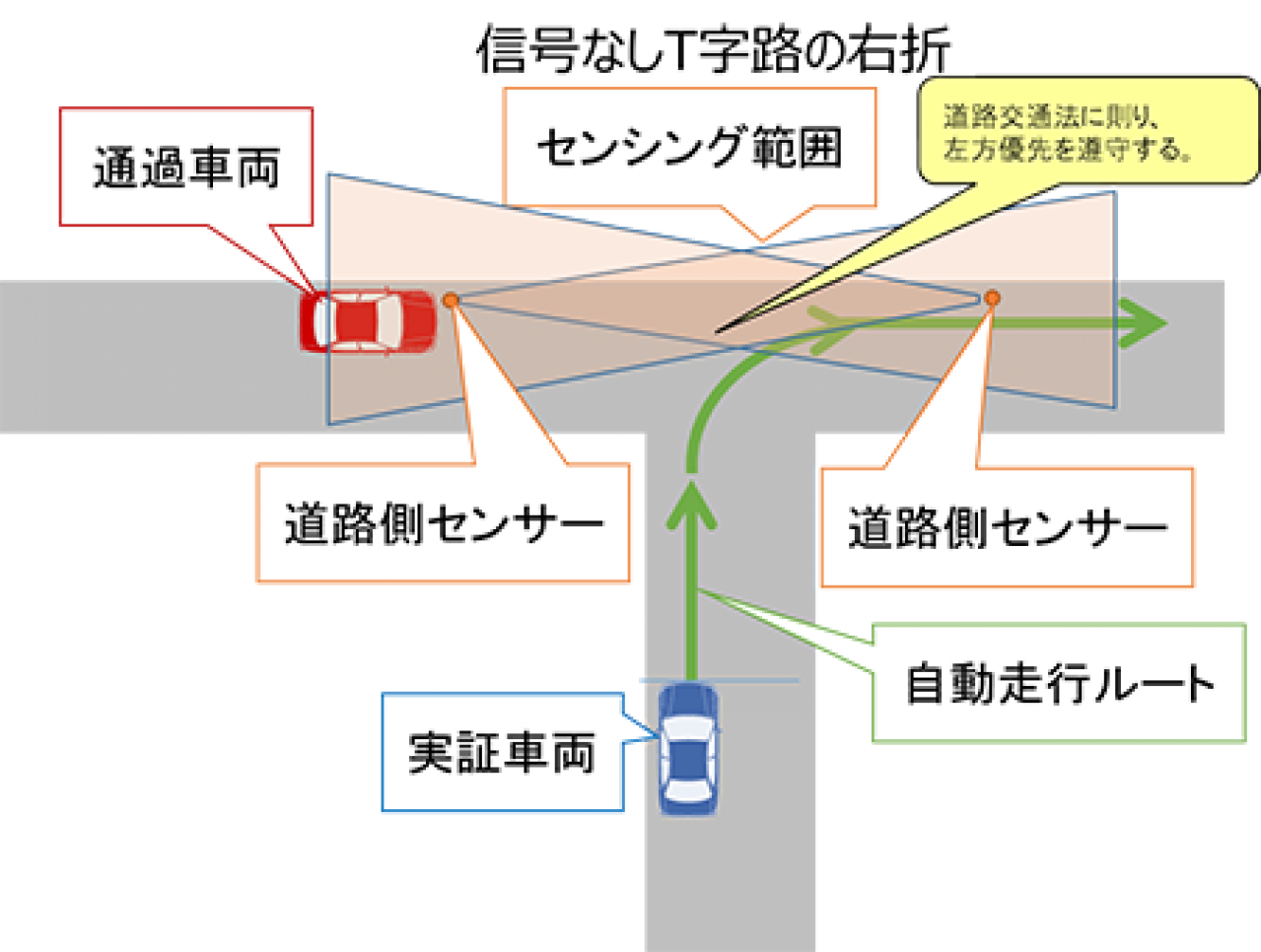
(B)信号なし交差点(十字路、T字路)での直進、右折
信号のない交差点(十字路およびT字路)において、実証車両の交差点通過挙動を検証する。
本実証実験は、優先道路側の対角車線を走行する通過車両の有無に分けて行う。実証車両は車載センサーおよび道路側センサーから取得した情報から対角車線を走行する通過車両や一般車両、歩行者等の有無を判断する。優先道路側の対角車線を走行する通過車両や一般車両、歩行者等が存在する場合は、それらの挙動(速度、加速度等)に応じて加減速または停止を行う。
評価は、交差点通過タイミングによる交通流の妨害の程度によって判断する。
|
|
|
自動車業界の最新情報をお届けします!
Follow @MotorFanwebおすすめのバックナンバー





自動車業界 特選求人情報|Motor-FanTechキャリア
「自動車業界を支える”エンジニアリング“ 、”テクノロジー”情報をお届けするモーターファンテックの厳選転職情報特集ページ

太平洋精工株式会社
生産技術/設備設計
年収
450万円〜750万円
勤務地 岐阜県大垣市岐阜県大垣市桧町450
この求人を詳しく見る
東証プライム、EV開発等で業界をリードする完成車メーカー
タイヤ開発エンジニア
年収
500万円〜900万円
勤務地 神奈川県厚木市
この求人を詳しく見る
「自動車業界を支える”エンジニアリング“ 、”テクノロジー”情報をお届けするモーターファンテックの厳選転職情報特集ページ
太平洋精工株式会社 生産技術/設備設計
| 年収 | 450万円〜750万円 |
|---|---|
| 勤務地 | 岐阜県大垣市岐阜県大垣市桧町450 |
東証プライム、EV開発等で業界をリードする完成車メーカー タイヤ開発エンジニア
| 年収 | 500万円〜900万円 |
|---|---|
| 勤務地 | 神奈川県厚木市 |
これが本当の実燃費だ!ステージごとにみっちり計測してみました。

日産キックス600km試乗インプレ:80km/h以上の速度域では燃費が劇...

BMW320d ディーゼルの真骨頂! 1000km一気に走破 東京〜山形往復...

日産ノート | カッコイイだけじゃない! 燃費も走りも格段に洗練...

渋滞もなんのその! スイスポの本気度はサンデードライブでこそ光...

PHEVとディーゼルで燃費はどう違う? プジョー3008HYBRID4とリフ...

スズキ・ジムニーとジムニーシエラでダート走行の燃費を計ってみた...
会員必読記事|MotorFan Tech 厳選コンテンツ

フェアレディZ432の真実 名車再考 日産フェアレディZ432 Chapter2...

マツダ ロータリーエンジン 13B-RENESISに至る技術課題と改善手法...

マツダSKYACTIV-X:常識破りのブレークスルー。ガソリンエンジン...

ターボエンジンに過給ラグが生じるわけ——普段は自然吸気状態

林義正先生、「トルクと馬力」って何が違うんですか、教えてくだ...

マツダ×トヨタのSKYACTIV-HYBRIDとはどのようなパワートレインだ...
3分でわかる! クルマとバイクのテクノロジー超簡単解説

3分でわかる! スーパーカブのエンジンが壊れない理由……のひとつ...

3分でわかる! マツダのSKYACTIV-X(スカイアクティブ-X)ってな...

スーパーカブとクロスカブの運転が楽しいのは自動遠心クラッチ付...

ホンダCB1100の並列4気筒にはなぜV8のようなドロドロ感があるのか...

ホンダ・シビック タイプRの謎、4気筒なのになぜマフラーが3本?
