後輪の左右トルク配分制御に加えて、世界初のラチェットシフト式ドッグクラッチによるディスコネクト機構を搭載 トヨタ新型RAV4のダイナミックトルクベクタリングAWDはここがすごい!
- 2019/04/10
-
MotorFan編集部


新型RAV4に用意されるダイナミックトルクベクタリングAWDは、従来の四駆のネガ要素とされる「曲がらない」「燃費が悪い」を改善する目的で、ふたつの技術を採用。舗装路/不整地どちらでも高い効果を発揮するこのメカニズムの詳細を解説する。

4月10日に発表された新型RAV4には、3種類もの四駆システムが用意された。ハイブリッド車は後輪を独立したモーターで駆動する「E-Four」、ガソリンエンジン車には「ダイナミックトルクコントロール4WD」と「ダイナミックトルクベクタリングAWD」の2タイプがある。
これら4WD全車は、駆動力だけでなくブレーキやステアリングアシストなどを統合的に制御する「AWD Integrated Management(AIM)」が搭載され、従来モデルよりも操縦安定性と走破性を向上させた。また「E-Four」はリヤモーター出力トルクをおよそ1.3倍に増やし、前後トルク配分も可変範囲を100:0〜20:80に設定。後輪駆動分をここまで高くしたことで、旋回時に思い描いたターゲットラインをトレースしやすくなっている。
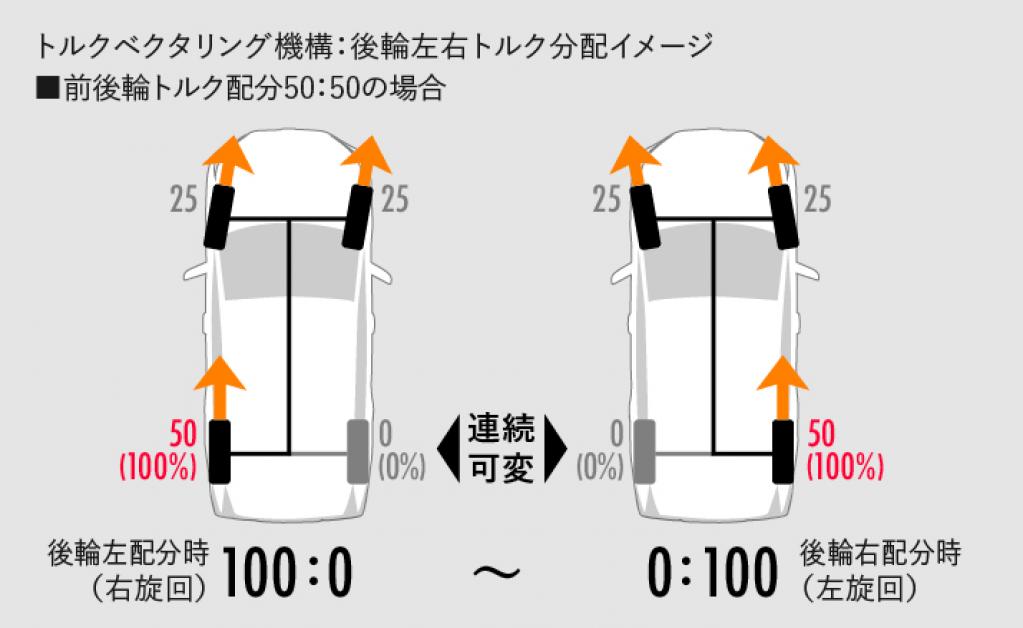
そして、もっとも注目したいのがガソリンエンジン上級グレードに設定された「ダイナミックトルクベクタリングAWD」である。これは、後輪左右にそれぞれ独立した電制カップリングを備えることで、リヤ左右の駆動力を0:100〜100:0の間で自在に可変可能。旋回時にコーナー外輪のリヤ駆動力を増してアンダーステアを抑制し「曲がる四駆」を実現。舗装路でのコーナリングだけでなくオフロードでも高い効果を発揮する。
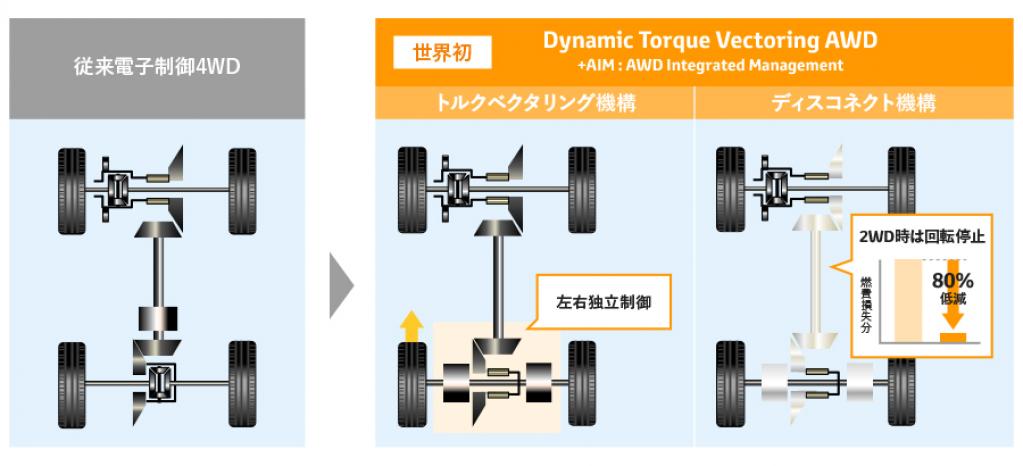
さらに、「ダイナミックトルクベクタリングAWD」にはもうひとつ、FWD走行時にはドッグクラッチを用いたラチェットシフト式のディスコネクト機構によってドライブシャフトの回転を完全に停止させ、駆動損失を大幅に低減させる機能を装備。この機構こそ、世界初となる技術なのだ。
「他のオンデマンド式四駆も、FWD状態は後輪への駆動系を多板クラッチ等で切り離しているのでは?」と思うかもしれない。確かにそうなのだが、トヨタのエンジニアによるとクラッチ等の引き摺り抵抗が意外に大きく、損失低減という点でまだやりきれていない、と感じていたという。
- 1/2
- 次へ
|
|
|
自動車業界の最新情報をお届けします!
Follow @MotorFanwebおすすめのバックナンバー






これが本当の実燃費だ!ステージごとにみっちり計測してみました。

日産キックス600km試乗インプレ:80km/h以上の速度域では燃費が劇...

BMW320d ディーゼルの真骨頂! 1000km一気に走破 東京〜山形往復...

日産ノート | カッコイイだけじゃない! 燃費も走りも格段に洗練...

渋滞もなんのその! スイスポの本気度はサンデードライブでこそ光...

PHEVとディーゼルで燃費はどう違う? プジョー3008HYBRID4とリフ...

スズキ・ジムニーとジムニーシエラでダート走行の燃費を計ってみた...
会員必読記事|MotorFan Tech 厳選コンテンツ

フェアレディZ432の真実 名車再考 日産フェアレディZ432 Chapter2...

マツダ ロータリーエンジン 13B-RENESISに至る技術課題と改善手法...

マツダSKYACTIV-X:常識破りのブレークスルー。ガソリンエンジン...

ターボエンジンに過給ラグが生じるわけ——普段は自然吸気状態

林義正先生、「トルクと馬力」って何が違うんですか、教えてくだ...

マツダ×トヨタのSKYACTIV-HYBRIDとはどのようなパワートレインだ...
3分でわかる! クルマとバイクのテクノロジー超簡単解説

3分でわかる! スーパーカブのエンジンが壊れない理由……のひとつ...

3分でわかる! マツダのSKYACTIV-X(スカイアクティブ-X)ってな...

スーパーカブとクロスカブの運転が楽しいのは自動遠心クラッチ付...

ホンダCB1100の並列4気筒にはなぜV8のようなドロドロ感があるのか...

ホンダ・シビック タイプRの謎、4気筒なのになぜマフラーが3本?
